Case study · A* routing for electric vehicles, with live charging stops
EV Route Optimizer
An Android app that plans multi-stop EV road trips end-to-end — real-time charging station insertion via OpenChargeMap, GraphHopper road routing, Open-Meteo weather effects, OBD-II Bluetooth SoC reading, and turn-by-turn MapLibre navigation. Built with Jetpack Compose and a custom A* engine over a (waypoint × SoC) state space.
01
The problem
Every popular EV navigation app treats charging stops as an afterthought — they slot in a single stop along the fastest road, ignoring your current battery level, your charger type, real-time station availability, ambient temperature effects on range, and the compound cost of going above 80% SoC on a tapered charge curve. The result is routes that look fast on paper but leave you range-anxious on the motorway.
02
The approach
Built a custom A* search engine over a two-dimensional state space: (waypoint index × state-of-charge). Each node is a (location, SoC) pair; edges are road segments whose energy cost comes from a physics model accounting for speed-dependent aerodynamic drag, rolling resistance, elevation gradient, temperature derating, and HVAC overhead. The charging model applies a non-linear taper above 80% SoC. Four optimisation modes (Fastest, Fewest Stops, Balanced, Eco) weight the heuristic differently. The engine dominance-prunes states, so it never expands a node if a cheaper path to the same location at higher SoC already exists.
03
My contribution
Sole developer — A* engine, energy and charging models, all four API integrations (GraphHopper, OpenChargeMap, Open-Meteo, Photon), OBD-II Bluetooth SoC reader, Room caching, WorkManager prefetch, calendar integration, and the full Compose UI with MapLibre navigation.
04
What I learned
The routing problem is harder than it looks because SoC is not just a constraint — it is part of the search state. Treating it that way (rather than post-processing a road route) is what allows the engine to find routes that would never emerge from a road-distance-only search: a slightly longer road segment that bypasses a detour to a slow charger, or a route that arrives at a fast charger with exactly enough margin to charge quickly and press on. The other hard lesson was the energy model: an overly aggressive speed-consumption curve caused the engine to over-insert stops on motorways. Calibrating it against real-world EV consumption data (80% rolling resistance, 20% aerodynamic drag growing with v²) brought the stop count in line with what drivers actually experience.
Screenshots
A multi-stop EV route planner that treats charging as a first-class citizen of the search — not a post-processing step bolted onto a road-distance result.
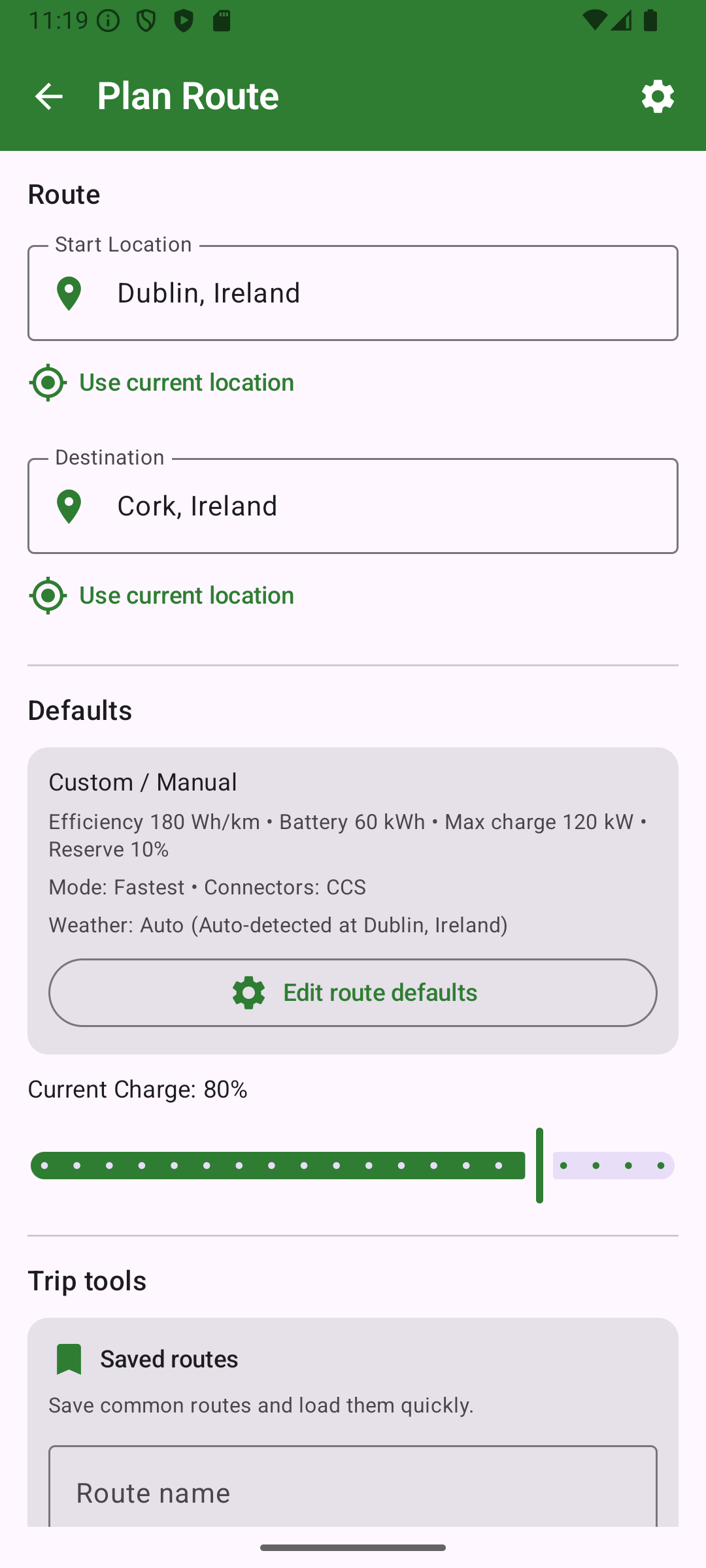
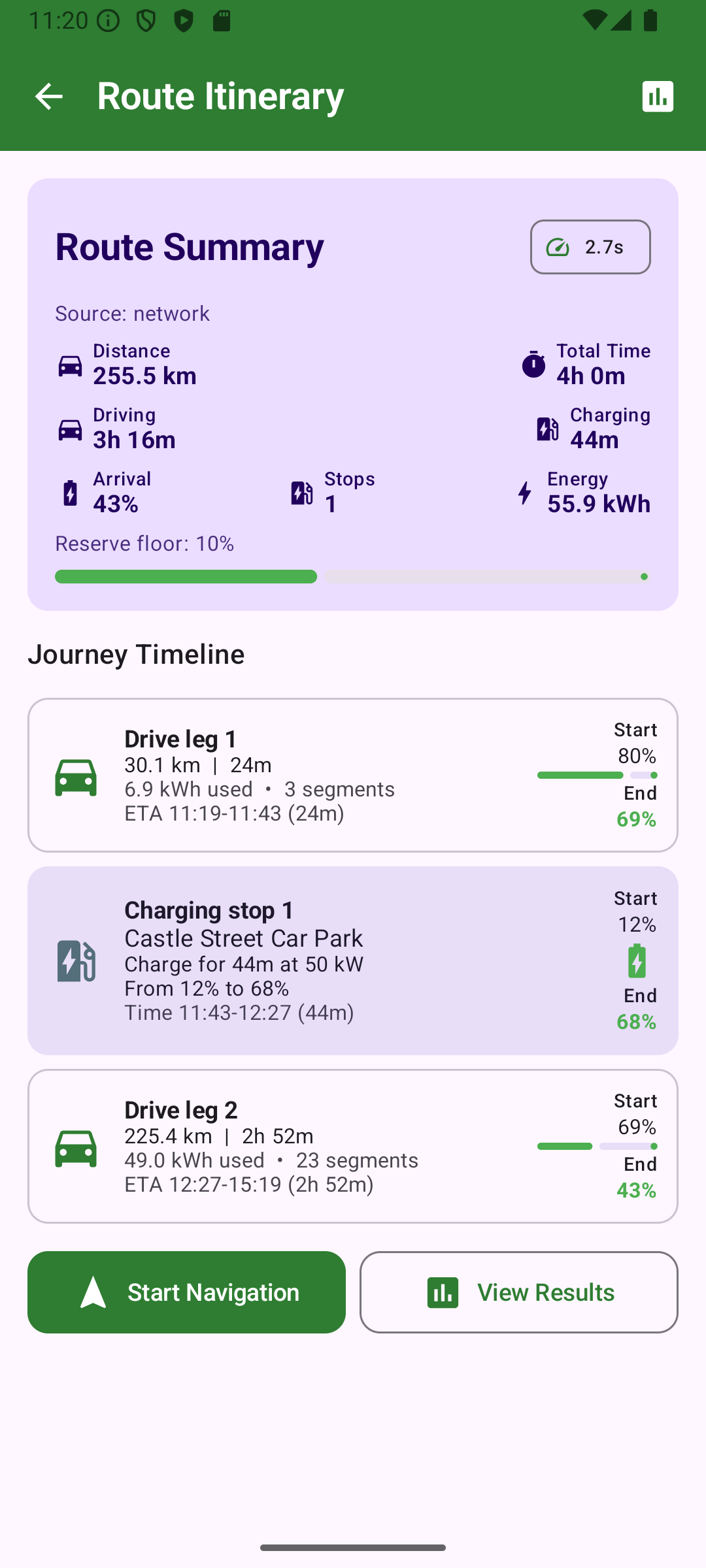
EV Route Optimizer plans electric-vehicle road trips end-to-end: you enter origin, destination, battery parameters, and connector type; the engine finds the optimal sequence of charging stops and returns a full itinerary with charge durations, arrival SoC at each stop, and a quality score versus the unconstrained baseline.
The app integrates four live APIs — GraphHopper for road segments and elevation, OpenChargeMap for real-time charging station data, Open-Meteo for temperature and weather, and Photon for geocoding — and reads current state-of-charge directly from the vehicle via an OBD-II ELM327 Bluetooth adapter.
How the routing engine works
The A* search operates over a (waypoint, SoC) state space. Every node is a (location, battery%) pair. Edges are road segments whose cost is computed from a physics-based energy model:
- Speed-dependent drag — rolling resistance (~80%) plus aerodynamic drag (~20%) growing with v². Calibrated to real EV consumption curves so the engine doesn’t over-insert stops on motorways.
- Elevation factor — net gravitational work per segment, signed (uphill costs, downhill recovers).
- Temperature derating — cold-battery and HVAC overhead extracted from Open-Meteo forecasts at the departure time.
- Charging model — non-linear taper above 80% SoC reflects real fast-charger behaviour; cold-battery derate applies to charging speed.
Dominance pruning ensures the engine never re-expands a (location, SoC) pair if it has already found a path to the same location at equal or higher SoC for equal or lower cost.
Four optimisation modes
| Mode | What it optimises |
|---|---|
| Fastest | Minimise total trip time including charge sessions |
| Fewest Stops | Minimise number of charging stops |
| Balanced | Weighted blend of time and comfort margin |
| Eco | Minimise energy cost; prefers lower speeds and gentler charge profiles |
Key features
- Live charging station insertion — OpenChargeMap filtered by connector type, minimum power, and a 6-hour freshness TTL.
- OBD-II SoC reading — ELM327 Bluetooth adapter; non-blocking I/O with a 3.5s timeout; circuit-breaker after 5 consecutive failures.
- Offline fallback — Room-cached routes (55m coordinate tolerance) and stations serve results when the network is unavailable.
- WorkManager prefetch — background job pre-warms station and route caches for saved trips before departure.
- Calendar integration — reads upcoming events with location fields and surfaces them as one-tap trip suggestions.
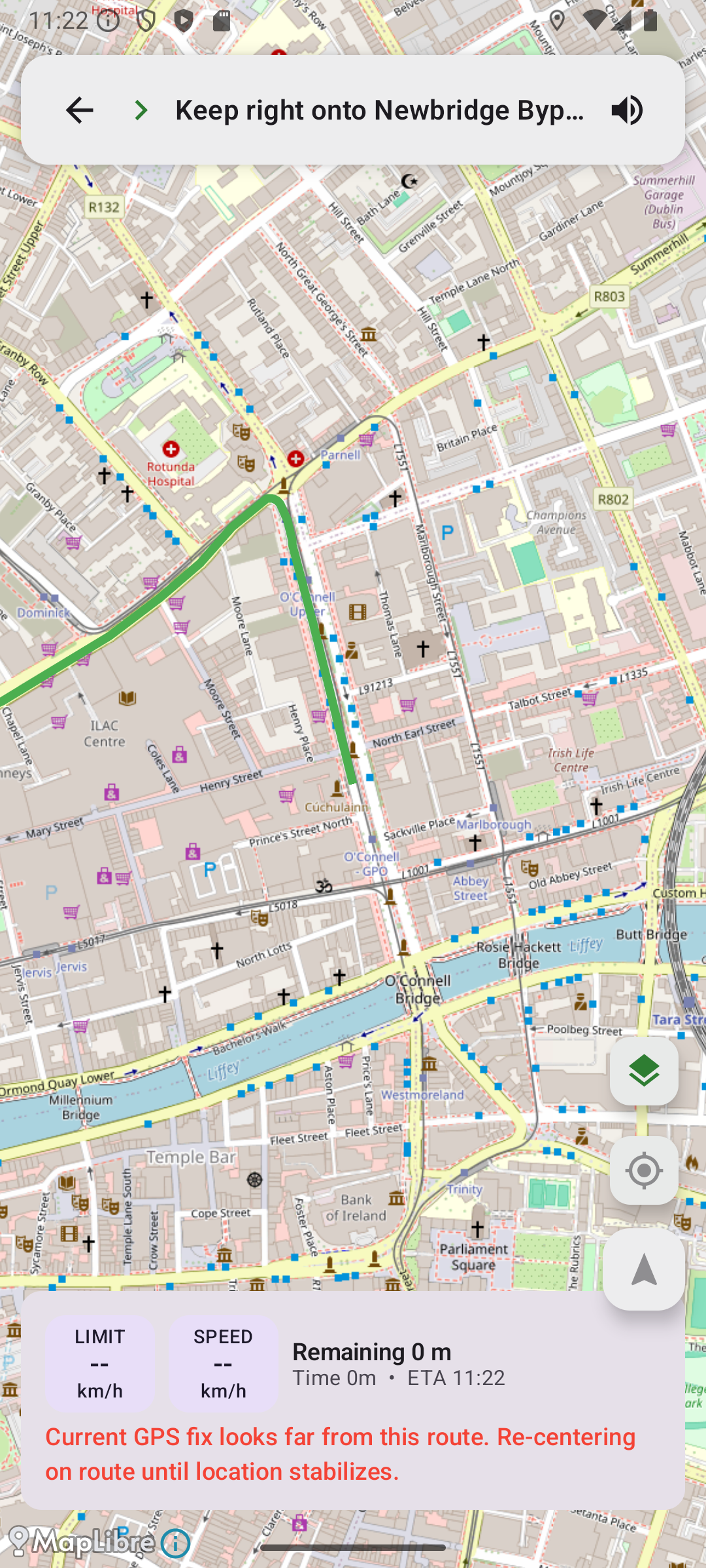
- Turn-by-turn navigation — MapLibre map with route polyline, location tracking, and a speed/ETA heads-up display.
- Sensor calibration — persistent efficiency calibration from real trips to refine the energy model over time.
Engineering highlights
- Custom A* over a two-dimensional state space — not a wrapper around any existing routing library.
- Physics energy model calibrated to real EV consumption data, not a lookup table.
- Non-blocking OBD serial I/O (
available()polling + deadline loop) to avoid indefinite blocking onInputStream.read(). - Room coordinate matching at 0.0005° (~55 m) to avoid serving cached routes for wrong locations.
Dispatchers.Defaultfor CPU-bound JSON serialisation;Dispatchers.IOfor all network and database work.- MVVM + Repository + Koin DI throughout; WorkManager
try-finallyensures DB handles are always closed.